Co-design of Planetary Spacecraft with Large Flexible Appendages
The attitude and orbit control subsystem (AOCS) of any spacecraft with large flexible appendages is complex and challenging. Traditional control systems are typically decoupled from the design of the spacecraft structure, leading to a sub-optimal conservative design with significant mass penalties, especially when an increase in pointing performance is required. A promising alternative solution to optimise the spacecraft design is to simultaneously optimise its structural parameters and attitude controller.
A TDE funded activity, led by Airbus Defence and Space (UK) with the Institut Supérieur de l'Aéronautique et de l'Espace (France), designed an integrated framework for co-designing planetary spacecraft with large flexible appendages. The objective of this framework is to minimise the spacecraft mass while simultaneously satisfying the AOCS requirements.

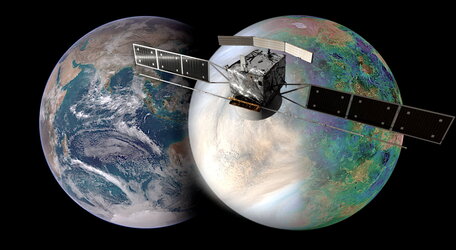
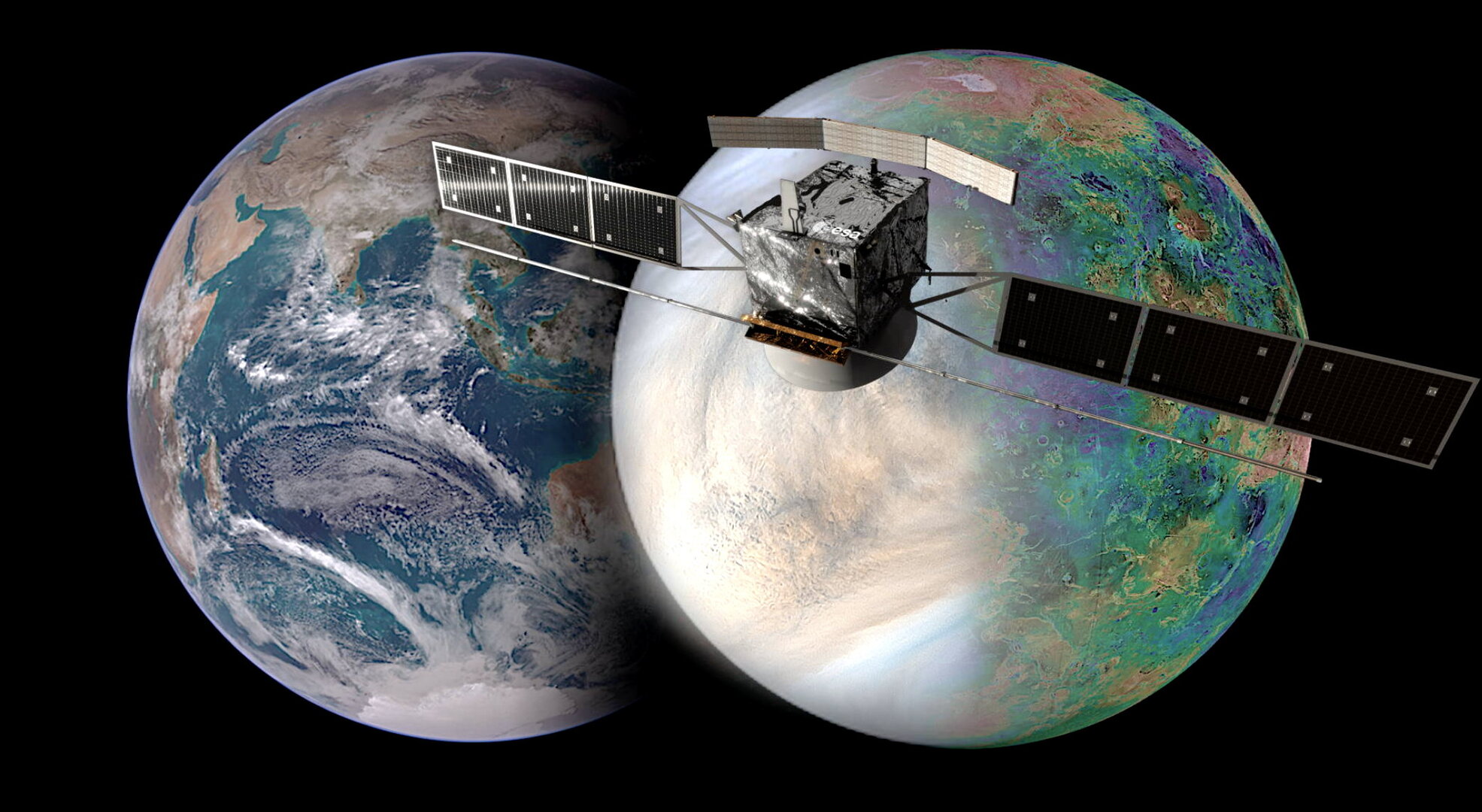
ENVISION, from the Science Directorate, was used as a comparative benchmark test case. The spacecraft has fine pointing requirements, with many flexible appendages (solar arrays, synthetic aperture radar, subsurface radar antenna). The implementation of either a direct or iterative co-design showed successful optimisation of the spacecraft total mass – reducing the total spacecraft mass by 42 kg – while being able to satisfy the mission and spacecraft performance requirements.

The direct co-design approach involved optimising the attitude controller and structural design parameters simultaneously via the MATLAB tool systune for robust control synthesis. Systune relies on advanced Linear Fractional Transformation (LFT) models of the spacecraft, which contained the optimisable parameters of the controller and the structural parameters as well as system uncertainties. The APRICOT tool was used in the generation of the LFT models by obtaining a polynomial fit from a number of finite element modelling points.
The iterative co-design, in comparison, used an outer global optimisation loop (e.g. particle swarm) to optimise the structural parameters and an inner systune optimisation for the attitude controller synthesis. Rather than using the polynomial fit from APRICOT, the iterative co-design approach ran the finite element modelling tool NASTRAN as part of the global optimisation loop.
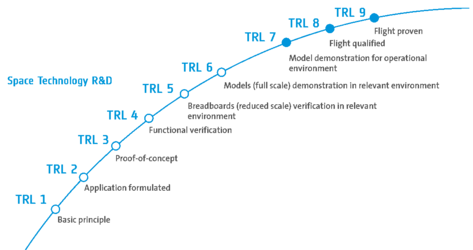
Contract 4000133632 closed in 2022 after successfully raising the technology readiness level to 4 (functional verification). The framework is now useable for a wide range of missions, providing an integrated modelling, design, analysis and verification approach.